Demonstrators
We validate the developed control, estimation, and learning methods on challenging robotics hardware platforms in order to highlight the advantages of novel techniques, but also to determine the limitations. The various applications include autonomous racing, autonomous flying vehicles, and multi-agent robotics.
Most of the hardware has been developed in-house with the plan of making both hardware and software open-source with the scope of making our research shareable and reproducible. In particular, the Collaborative Robotic Systems (CRS) platform is meant to be a simple system to test both autonomous racing and multi-agent robotics algorithms.
Autonomous Racing
Autonomus racing is a challenging task that pushes the controller's capabilities to the limits. In these projects, we study the racing problem from different angles in order to get insights on both perfomance and safety of the controllers.

Modelling of cars at racing conditions is challenging, especially at the limits of tire adheasion. In these projects, we study how to improve racing both in terms of performance and safety. In a first project, we focus on how to automatically learn model deviations from online measurements, together with an uncertainty estimate of our model, where we aim to enhance both racing performance and safety. In a second project, we implement a nonlinear safety filter to guarantee safety under any controller. And finally, in a third project, we study how to efficiently and automatically tune a learning-based controller using data from different racing contexts.
Selected Publications
- Lukas P Fröhlich, Christian Küttel, Elena Arcari, Lukas Hewing, Melanie N Zeilinger, Andrea Carron, Model Learning and Contextual Controller Tuning for Autonomous Racing [under review]
- Ben Tearle, Kim P Wabersich, Andrea Carron, Melanie N Zeilinger, A predictive safety filter for learning-based racing control, IEEE Robotics and Automation Letters, 2021.
- Lukas Hewing, Alexander Liniger and Melanie N. Zeilinger. Cautious NMPC with Gaussian Process Dynamics for Autonomous Miniature Race Cars. European Control Conf., 2018.
- Lukas Hewing, Juraj Kabzan and Melanie N. Zeilinger, Cautious model predictive control using Gaussian process regression. IEEE Transactions on Control Systems Technology, 2019.
- Juraj Kabzan, Lukas Hewing, Alexander Liniger, Melanie N. Zeilinger. Learning-Based Model Predictive Control for Autonomous Racing. IEEE Robotics and Automation Letters, 2019.
Contact Persons
Andrea Carron
Collaborations
Some have to projects have been in collaboration with Ifa and AMZ.
Unmanned Aerial Vehicles
Autonomous take-off and landing is a challenging application for guidance and control algorithms developed in our research. To enable rapid validation and testing of our algorithms, we developed a small-scale unmanned aerial vehicle that allows easy deployment of newly developed algorithms.

In collaboration with Embotech, we developed an unmanned vertical take-off and landing (VTOL) vehicle dubbed EmboRockETH. The EmboRockETH is designed to mimic the dynamics of a reusable launcher and acts as a low-cost small-scale testbed for guidance and control (G&C) algorithms. Commonly, G&C algorithms for aerospace applications are tested on complex and expensive replicas of reusable launcher. In contrast, the EmboRockETH is a readily available alternative to these test platforms and allows fast deployment and testing of new algorithms.
Our research focuses on developing efficient and safe G&C algorithms for which we use the EmboRockETH as an assessment tool.
Selected Publications
L. Spannagl, E. Hampp, A. Carron, J. Sieber, C. A. Pascucci, A. U. Zgraggen, A. Domahidi, and M. N. Zeilinger. Design, optimal guidance and control of a low-cost re-usable electric model rocket. IROS, 2021.
Contact Persons
Andrea Carron
Jérôme Sieber
Collaborations & Funding Sources
The project was developed in collaboration with Embotech AG
Collaborative Robotic Systems - (Hardware and Software Framework)
Collaborative Robotic Systems (CRS) is a flexible and open source hardware and software framework for simulating and testing autonomous racing and multi-agent control.

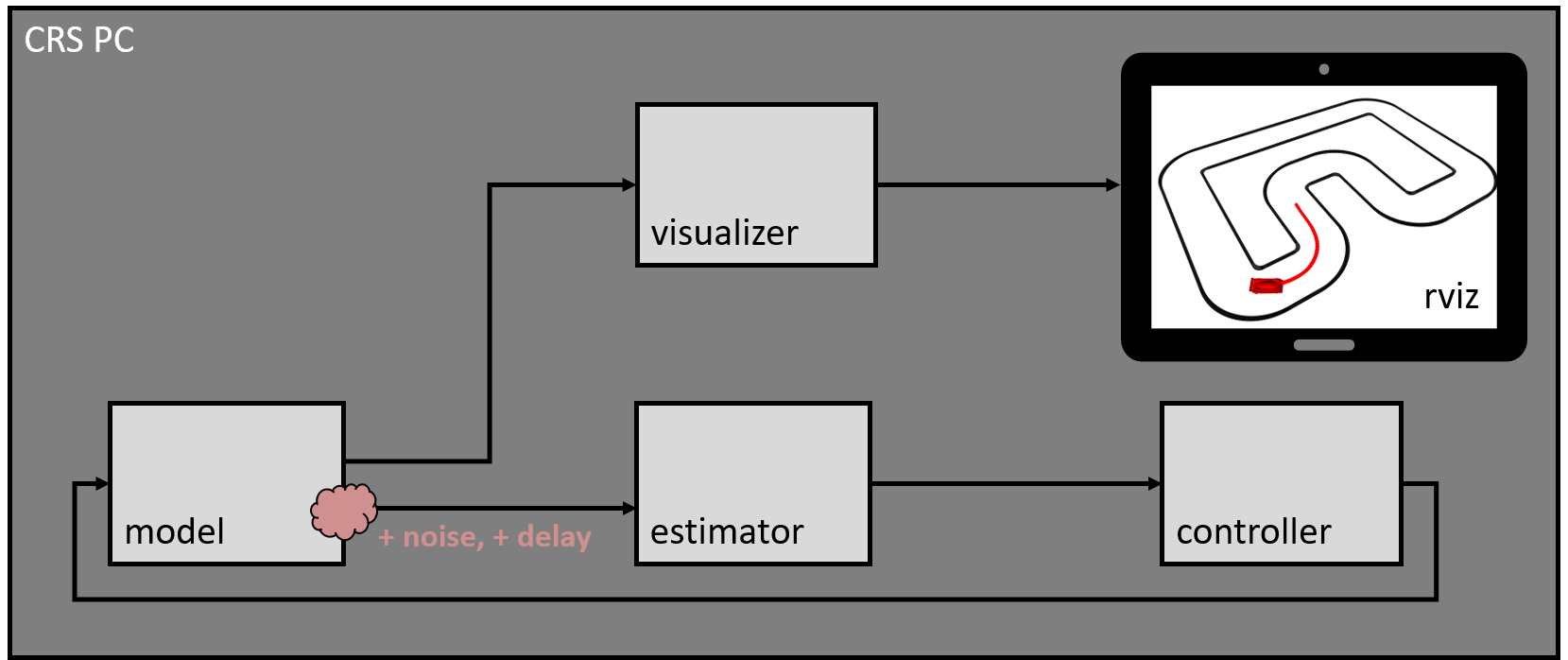
The CRS software framework is ROS-based and Dockerized. In simulation, it allows the user to simulate components like models, controllers, state estimators, and safety filters. Thanks to the ROS environments, it is possible to easily adjust the control pipeline, log simulation data, and visualize the behaviour of the controlled systems. An example of the typical used architecture is depicted below.
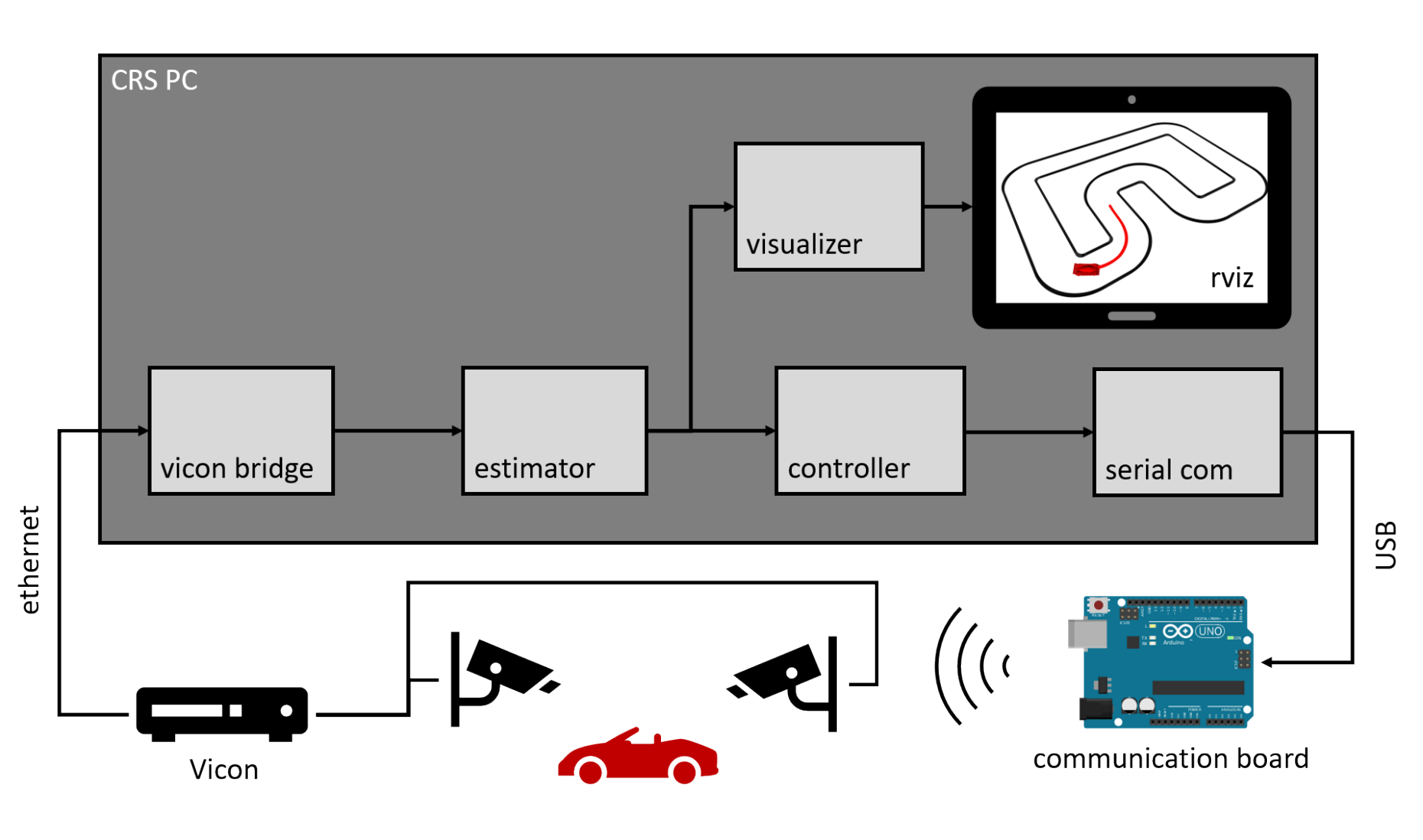
Moving from simulation to hardware requires only to subsitute the model node with two nodes that take care of sending commands to the cars and reading the sensors. In our standard setup, we use a custom communication module to send commands to the cars and we use Vicon as localization system. An example of the typical used architecture is depicted below.
The hardware used in the CRS platform are Kyosho Mini-Z cars, e.g., see image below

The controller is modifed such that the radio communication with a laptop is possible. The experiments are carried over a surface covered with yoga mats. The software and the PCBs are going to be open sourced soon.
Contributors
The development of CRS would have not been possible without the support of many students, PhDs, and Postdocs.
We want to thank (in alphabetical order):
Sabrina Bodmer
Andrea Carron
Robin Frauenfelder
Lukas Froelich
Alex Hannson
Elias Hampp
David Helm
Jannes Huehnerbein
Christian Kuettel
Daniel Mesham
Simon Muntwiler
Logan Numerow
Marc Rauch
Rahel Rickenbach
Jerome Sieber
Fenglong Song
Petar Stamenkovic
Patricia Sung
Pascal Sutter
Ben Tearle
Lukas Vogel
Andrea Zanelli
Selected Publications
- Lukas Froelich, Christian Kuettel, Elena Arcari, Lukas Hewing, Melanie N. Zeilinger and Andrea Carron, Model Learning and Contextual Controller Tuning for Autonomous Racing. 2021. external page[arXiv preprint]
- Ben Tearle, Kim Wabersich, Andrea Carron, Melanie N. Zeilinger, A predictive safety filter for learning-based racing control. IEEE Robotics and Automation Letters, 2021. external page[ieeexplore]
Contact Person
Andrea Carron
Funding Sources
ETH Zurich Seed Grant - SEED-19 18-2