Juggling Machines
Mathematics-Driven Design Enables Machines to Juggle Balls Without Sensory Input
In this project, several unique juggling robots have been developed that can juggle without any cameras, microphones, or any other sensors to detect the balls. We used mathematical analysis to design the hardware of the robots such that sensorless juggling is possible.
The juggling robots are used as test-beds for validating algorithms and tools we develop in our research in the control of dynamic systems. The main research project investigates the use of chaos to control dynamic systems that are challenging to control due to their symmetric structure.
In addition, the juggling robots are regularly exhibited at engineering promotion events in Swiss high-schools, and in other outreach activities.
For detailed information about the robots and the research, please visit the external pageproject website.
A list of current student projects can be found on the IDSC Theses and Projects Page.
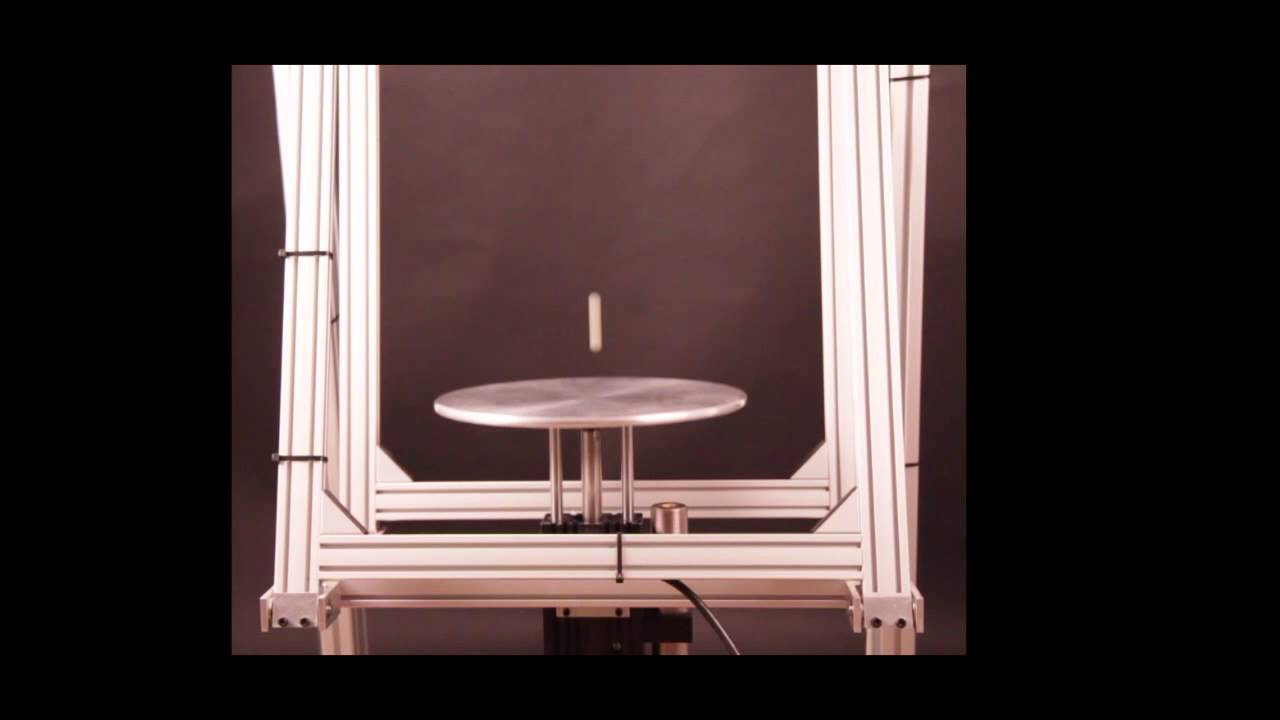
The Blind Juggler

The first machine in the series provided the proof-of-concept for sensorless juggling. The key elements that enable sensorless juggling are the shape and motion of the aluminum paddle on which the ball is bouncing. The paddle features a slightly concave shape, which makes sure that the ball does not fall off the Blind Juggler. The motion of the paddle is designed to keep the ball bouncing at a consistent height.
For more information, visit the external pageproject website.
The Swinging Blind Juggler

The Swinging Blind Juggler takes the concept of sensorless juggling a step further than the Blind Juggler: It is the Blind Juggler strapped to a pendulum-like structure. The ball is struck at the peak angles of the pendulum, resulting in a side-to-side juggling of the ball. The machine can juggle without any sensors detecting the ball, which is enabled by the same paddle shape and motion as used in the Blind Jugger.
Senorless juggling is only possible if the pendulum remains synchronized to the ball motion. We developed a feedback strategy that uses special paddle motions to control the pendulum motion. The physics that make this possible are similar to what children intuitively use to control their amplitude on a swing.
For more information, visit the external pageproject website.
The Cloverleaf Blind Juggler

The machine features a four-leafed paddle with four concave areas that allow bouncing up to four balls at the same time. With the Cloverleaf Blind Juggler, we can demonstrate the rich dynamics that a bouncing ball on a paddle exhibits. For example chaotic ball motions or the simultaneous existence of distinct, stable periodic ball motions. We use the Cloverleaf Blind Juggler for research in algorithms for the control of systems with underlying symmetries (the identical balls).
For more information, visit the external pageproject website.
Please visit the external pageproject website for more information.
A list of publications and student projects is available on the external pageproject website.
Select Videos
For a full list of videos, visit the external pageYouTube channel of the juggling machines.