Research Projects
Research in our group can be roughly divided into the following areas:
- Autonomy, with a special focus on self-driving cars;
- Mobility and transportation systems;
- Theoretical foundations in systems, perception and control.
A brief description of these areas with some of the ongoing research projects follows.
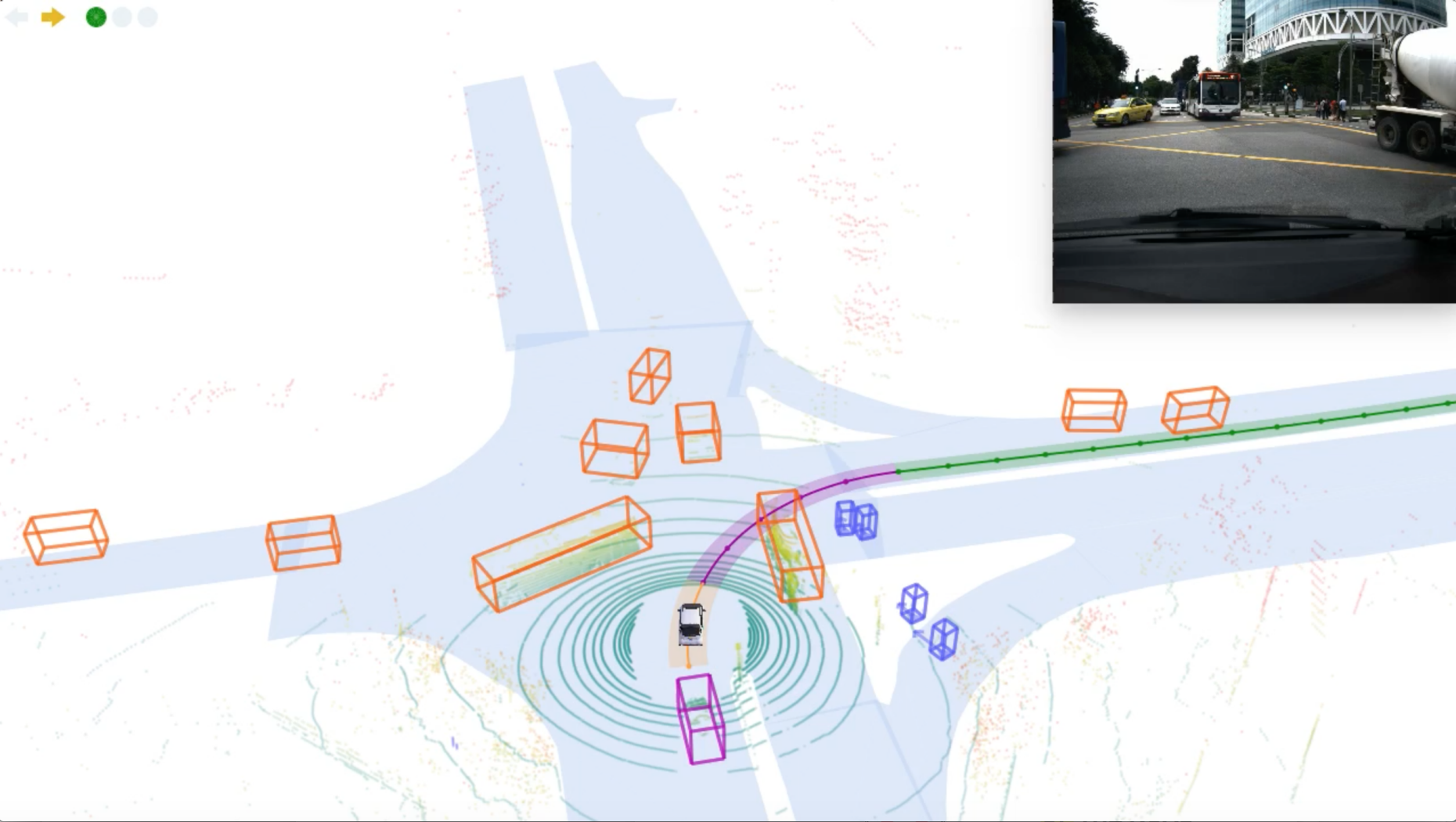
Autonomy and self-driving cars
The goal of this research effort is to enable vehicles such as cars and airplanes to safely and reliably drive/fly themselves in an uncertain, dynamic world (public roads, national airspace).
Gokart platform
Part of the research is carried out on our go-kart platform which allows to benchmark algorithms beyond the common safety measures imposed by public roads. See additional info here.

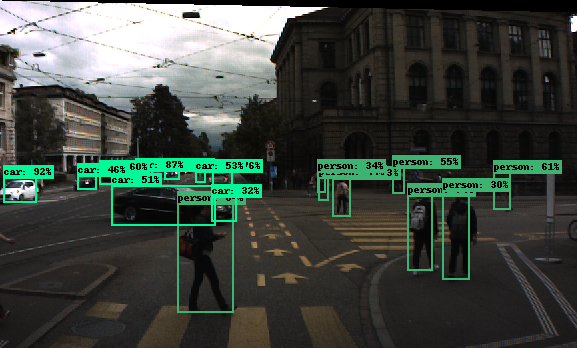
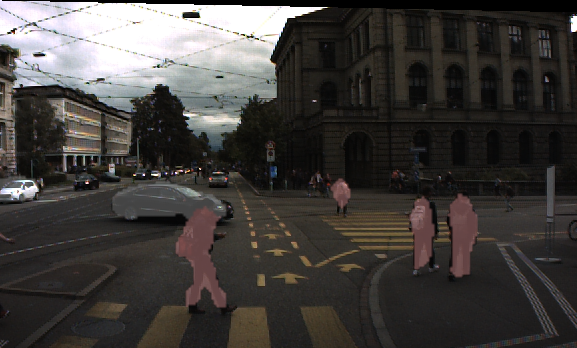
Investigating novel sensors
Testing low TRL (technology readiness level) cameras. Part of our research encompasses potential applications of novel sensing technology such as event-based cameras or solid state Lidars. To this end, we seldomly record videos and depth data from public roads. The collection might include footages from a low-resolution RGB-camera, an event-based camera, an infrared camera, and an Aeye Lidar unit mounted on top of a car labeled with “ETH Zürich”. The car will be occasionally driving around the urban area of Zurich and surroundings from August '19 until termination of the project.
Please contact for more information.
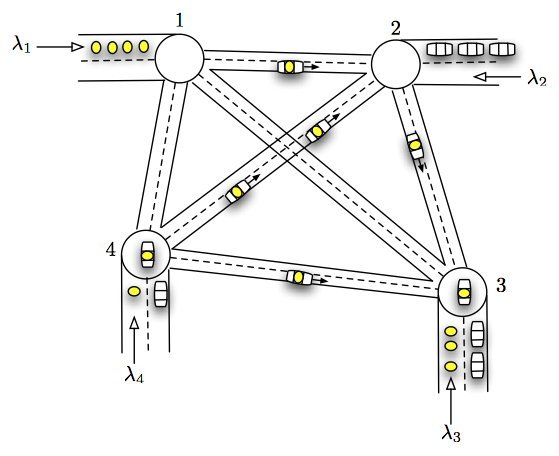
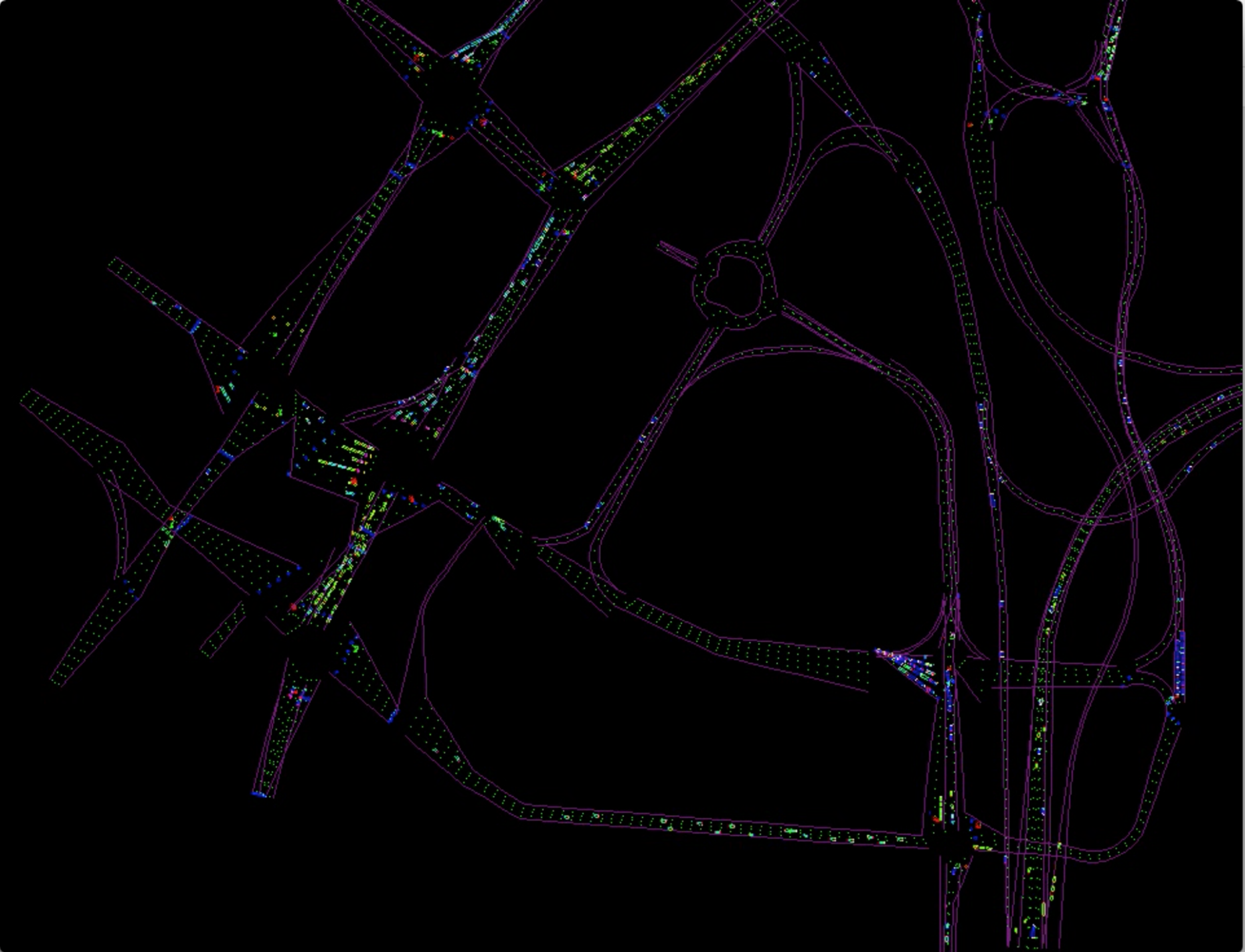
Mobility and Transportation Systems
The goal of this research effort is to develop advanced control and optimization methods to enable new concepts for large-scale transportation systems.
Theoretical foundations
There is nothing as practical as a good theory.
We support our applied research projects above by advancing the state of the art in foundational areas such as
- Control theory and Game theory
- Algorithmic robotics
- System design, optimization, and co-design
- Learning theory