Laboratory Practice (Messlabor)
Experiments
For detailed description click on the experiments:
Description
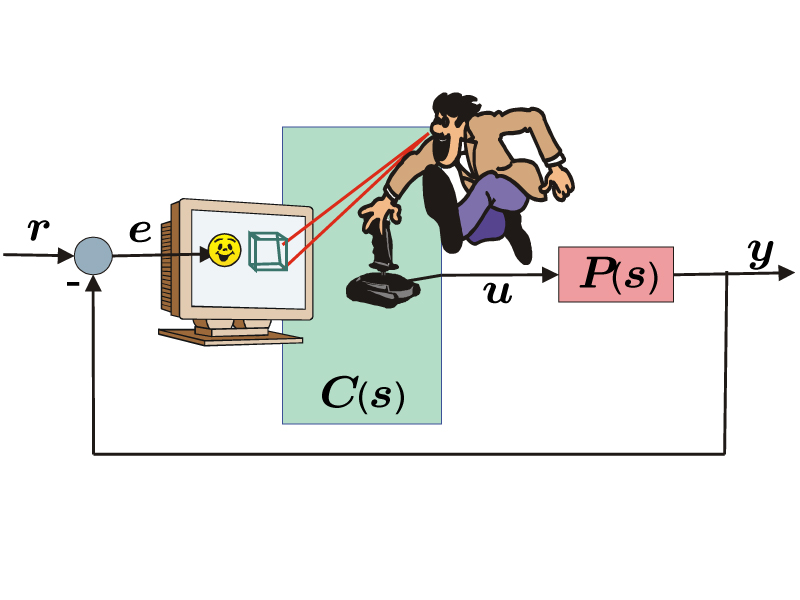
In this experiment, you ARE the controller! You are in the loop with a joystick and a screen as the interfaces to different plants that must be controlled. Based on that experiment, the transfer function of the human controller is derived and modeled.
Methods
Transfer functions, Bode plots
Script
DownloadDownload (PDF, 223 KB)
Place
ML J 44.1
Description
Loading cranes are widely used in the transportation of cargo. In this experiment you design a controller for all the axes of our crane. With a joystick, you can test the difficulty of controlling the plant.
Methods
Modelling, PID, LQR, Estimator
Script
DownloadDownload (PDF, 3 MB)
Place
ML J 44.1

Description
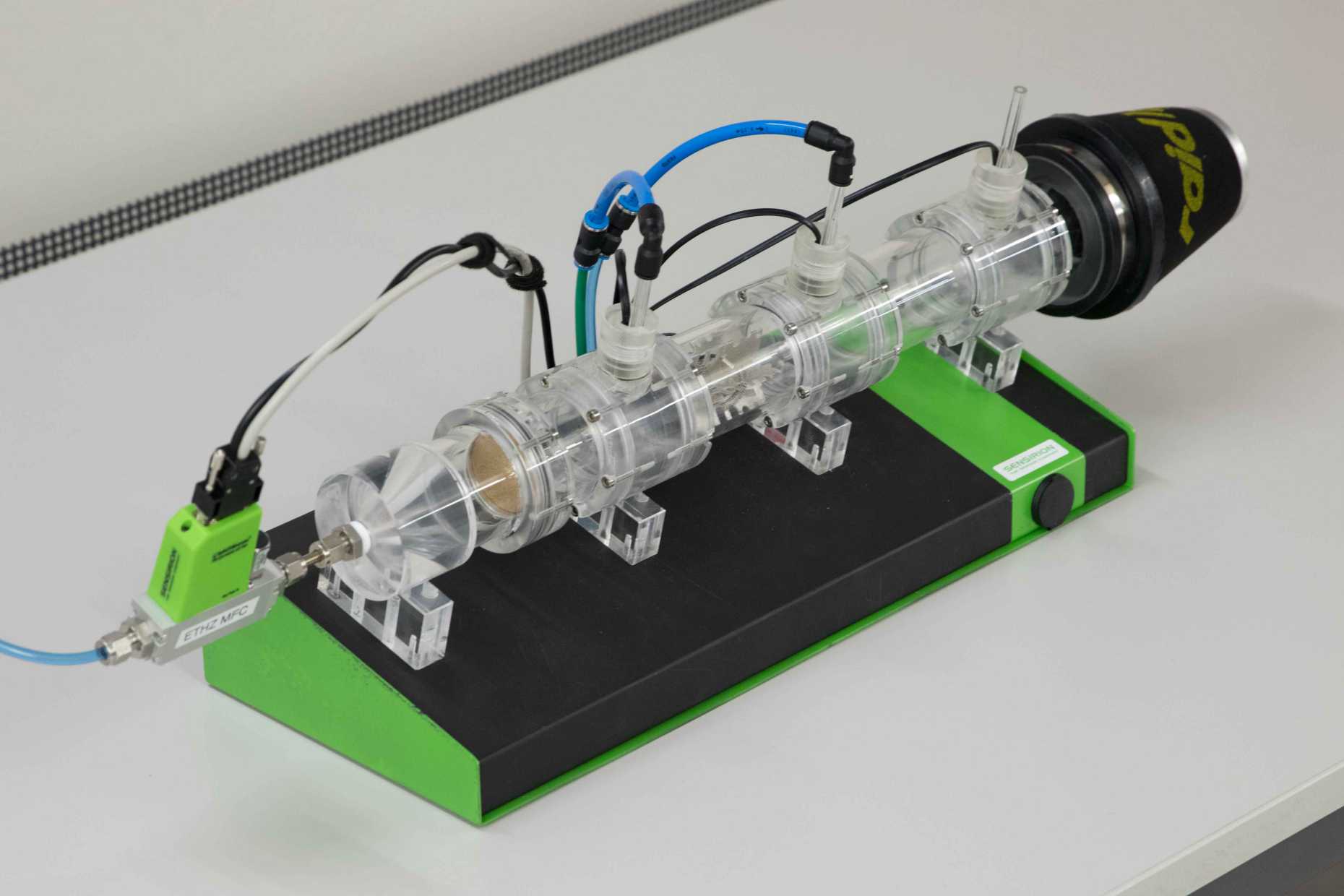
This experiment gives you a basic insight into the challenges of sensor technology using the example of a mass flow sensor. In doing so, you will compare a simple prototype of the measurement principle with the finished, highly integrated product from Sensirion. The lab provides intuition for system modeling and PID control and gives you access to Simscape as an extension to modeling in Simulink.
Methods
Thermodynamic modelling, PID controller, Simscape
Script
DownloadDownload (PDF, 2.5 MB)
Place
ML J 44.1
Description
The diving bell is an unstable system because of the compressibility of air. The design of a robust controller is a challenge for a control engineer. First a PI controller is tested. With a simple modification it is possible to control the unstable diving bell in the Simulink simulation. In a second step, a MIMO controller is implented and compared to the previously developed SISO controller.
Methods
PID, Pole placement, LQR
Script
DownloadDownload (PDF, 834 KB)
Place
ML J 44.1

Description
With the inverted pendulum the implementation of control strategies on a real plant can be conducted. A GUI guides you through the experiment and demonstrates the basic of control systems. With some modifications of the real plant, the robustness of your control strategies are tested.
Methods
PID, Lead-Lag
Script
DownloadDownload (PDF, 962 KB)
Place
ML J 44.1
Description
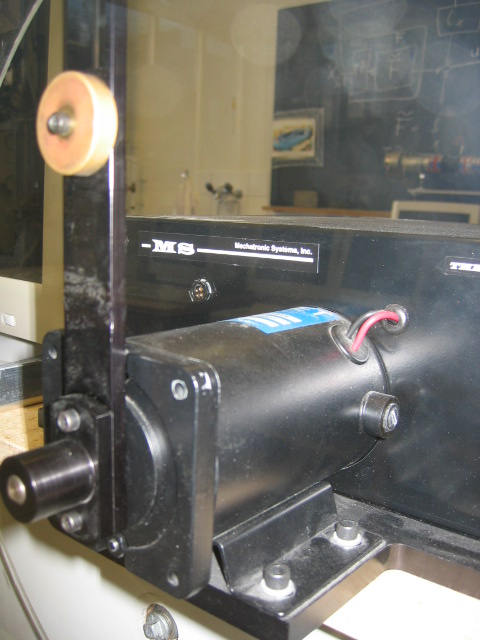
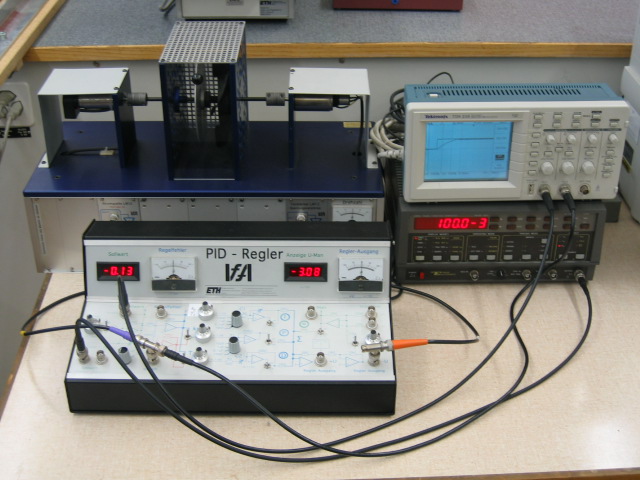
In this experiment, you tune an analog PI controller to control the rotational speed of an electrically driven axle. The tuning is carried out with time-domain tools such as the rules of Ziegler-Nichols. In a first step the model of the plant is validated with the hardware. Based on that validated model, tuning is carried out in simulation as well as on the hardware.
Methods
PI controller, rules of Ziegler-Nichols, time-domain specifications
Script
DownloadDownload (PDF, 12.5 MB)
Files
Downloadplant_step.m (M, 2 KB)
Downloadspeedcontroller.m (M, 4 KB)
Place
ML J 44.1
Description
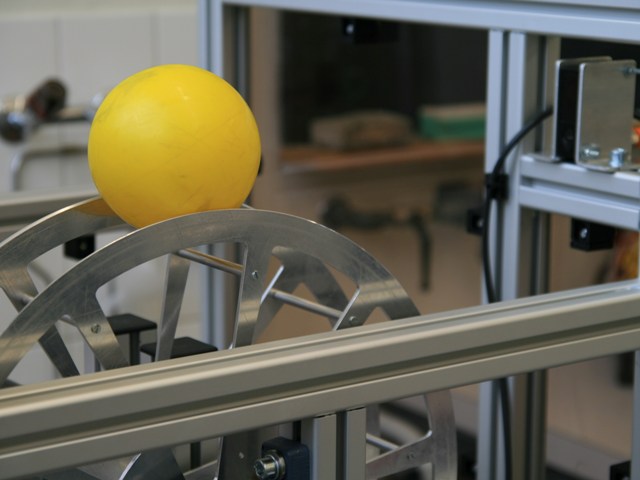
The ball on wheel consists of a wheel that is actuated by an electric motor. The position of the ball that has to be balanced on top of it is measured by a laser sensor. You investigate wether measurement of the rotational speed of the wheel is necessary to observe/stabilize the system. Based on that, you design two controllers to stabilize the ball and allow for reference tracking of the wheel's speed. The first controller being the focus of this experiment consists of two cascaded SISO-loops. The second controller is a MIMO-controller that will be compared to the cascaded controllers.
Methods
Loop-shaping, pole placement
Script
DownloadDownload (PDF, 432 KB)
Files
DownloadDownload (M, 1 KB)
Place
ML J 44.1
Description
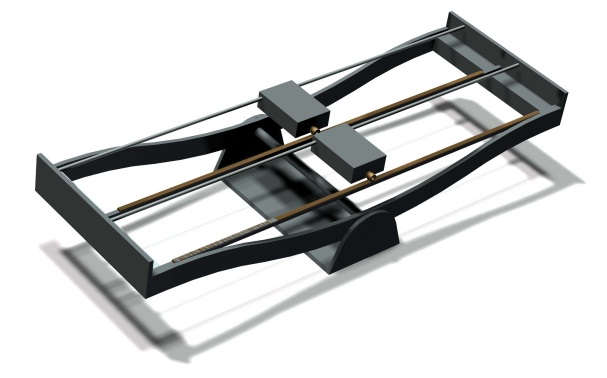
In this lab different controllers to balance a seesaw with two independently controllable carts are designed. In the first part of the experiment, a SISO-LQR controller is designed to balance the seesaw only by one cart. The second cart is used to induce disturbances on the seesaw and, consequently, to test the robustness of the developed controller. The developed controller is then extended by an integrator element to improve its performance. In the second part of the experiment, a MIMO-LQR controller using both cars is designed.
Methods
LQR, LQRI, MIMO
Script
DownloadDownload (PDF, 1.5 MB)
Files
DownloadDownload (ZIP, 12 KB)
Place
ML J 44.1
Description
In this experiment, you will get an introduction to the basic concepts of Model Predictive Control (MPC). This modern control method is characterized, among other things, by its ability to explicitly take constraints into account. By using an optimization problem to compute the control variables, MPC is fundamentally different from many classical control concepts such as PID. In this lab, you will have the opportunity to learn about the operation of a nonlinear MPC controller on a real system, a minisegway, and to become familiar with the most important building blocks such as quality criterion, time horizon and constraints.
Methods
System modeling, LQR, Optimization, Modle predictive control
Script
DownloadDownload (PDF, 2.5 MB)
Place
ML J 44.1

Description
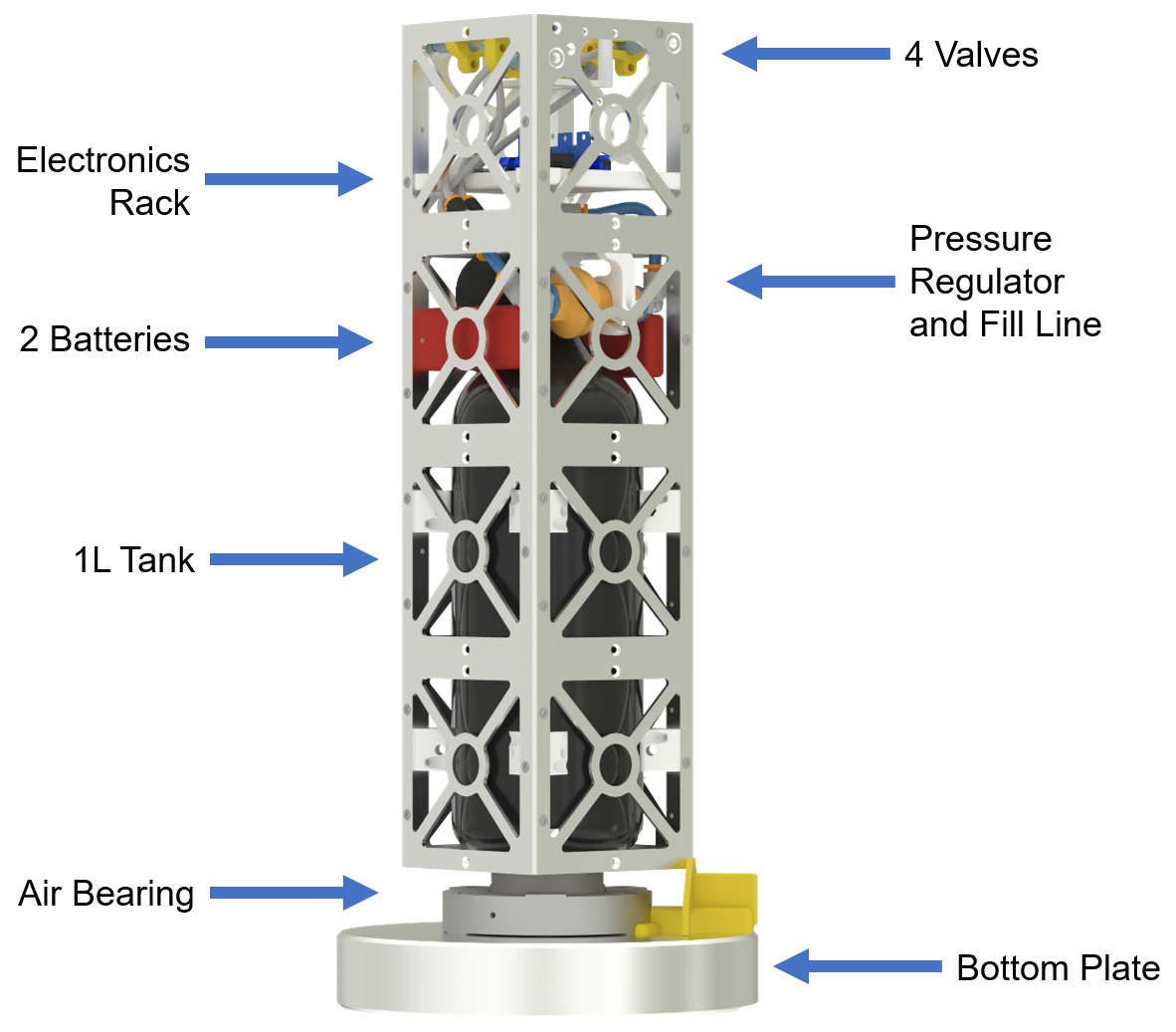
Satellites often need a precise attitude determination and control system (ADCS) to be able to point at a specific area of the earth. During this lab, you will learn different control techniques which can be used to control a 4U satellite placed on an air-bearing. The attitude control is done using four small thruster units consisting of a small valve and a nozzle.
Methods
PD, Feed forward, Schmitt trigger
Script
DownloadDownload (PDF, 2.1 MB)
Files
DownloadDownload (ZIP, 409 KB)
Place
ML J 44.1
Script
Individual handouts for each of the experiments.
Laboratory
4 hours per week for 12 weeks.
A total of ten experiments in the following areas are required:
- Physics (at least four)
- Control (see above)
- Electronics
- Energy systems
- Fluid dynamics
- Mechanics
- Process engineering